Durch die Senkrechtstellung der Nordsegmente bei einer VNS Plattform werden die Rollenlager und der Antrieb im Vergleich zu einer CS Plattform vereinfacht. Ich verwende bei all meinen Plattformen einen Direktantrieb über Reibung. Dies erlaubt eine robuste Bauweise und ein wirklich extrem einfaches und schnelles Rückstellen der Plattform.
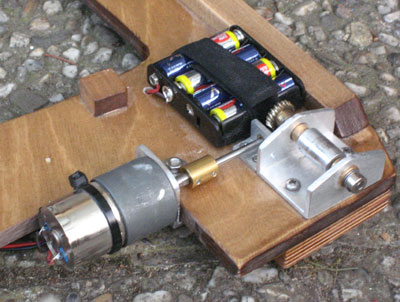
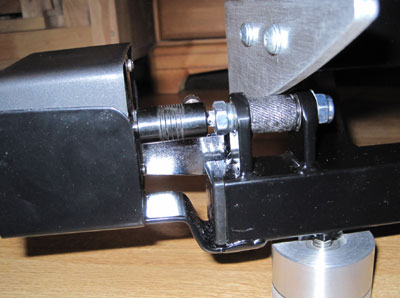
Der Motor ist ein RB35 1:600 Getriebemotor (Conrad) und treibt über ein 1:20 Schneckengetriebe (ebenfalls Conrad) eine in Gleitlagern geführte Silberstahlwelle an. Diese Stahlwelle dient als Reibungsantrieb. Bedingt durch die direkte Kraftübertragung vom Dobson auf die Welle und das höhere Gewicht des Dobsons ist die Friktion zwischen Welle und Segment groß genug, dass kein Schlupf entsteht. Alternativ (wie rechts gezeigt) kann man auch den Durchmesser der Antriebsachse zum Beispiel durch einen Aluhülse vergrößern.
Die Drehzahl des Motors wird über die anliegende Spannung eingestellt, was hier über einen Spannungsregler (siehe unten) erreicht werden kann. Damit wird ein absolut ausreichender Gleichlauf des Motors erreicht. Der Spannungsregler hat gegenüber einem einfachen Vorwiderstand den Vorteil, dass die Motor-Spannung bei nachlassender Batteriespannung nicht nachreguliert werden muss.